Built with love by Lazar Dragos George. The content may not be distributed without my permission.
Rover PathPlanner 2025
Description
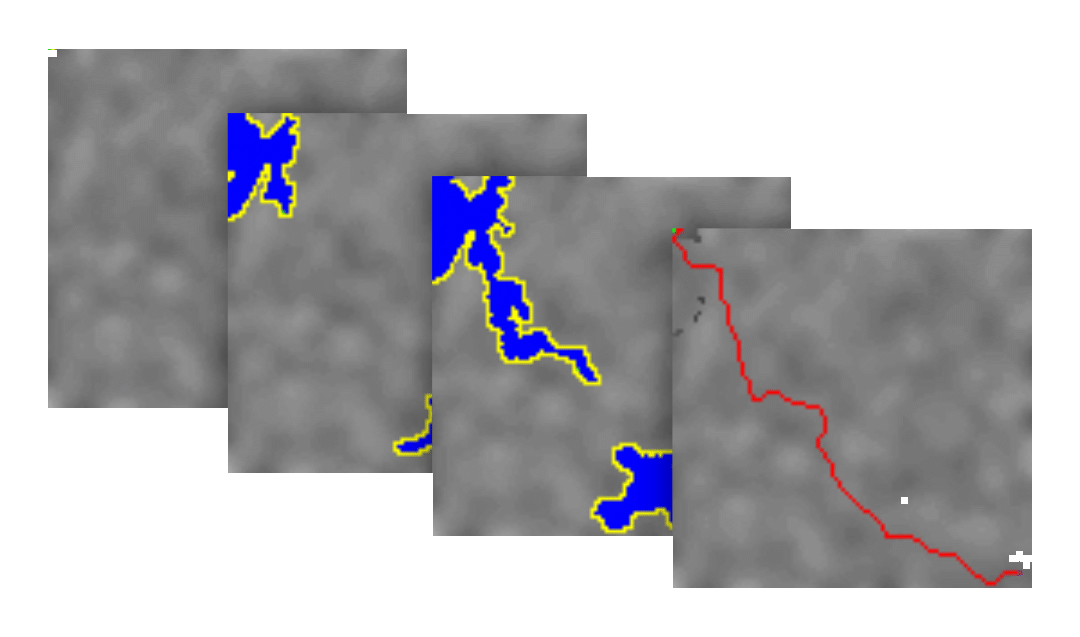
Built a rover terrain planner, starting with a Python A* prototype (30° constraint). Ported it to Rust with bidirectional A* and optimizations, doubling performance. Highlights skills in algorithm design, optimization, and cross-language development.
Type
Solo Project
Timeline
Oct 14, 2025 - Oct 15, 2025
Client
Pulsar UPB Team
My Roles
Python Scripting
Rust Scripting
Tech Used
Quick Links
GitHub