Built with love by Lazar Dragos George. The content may not be distributed without my permission.
IntoTheDeep
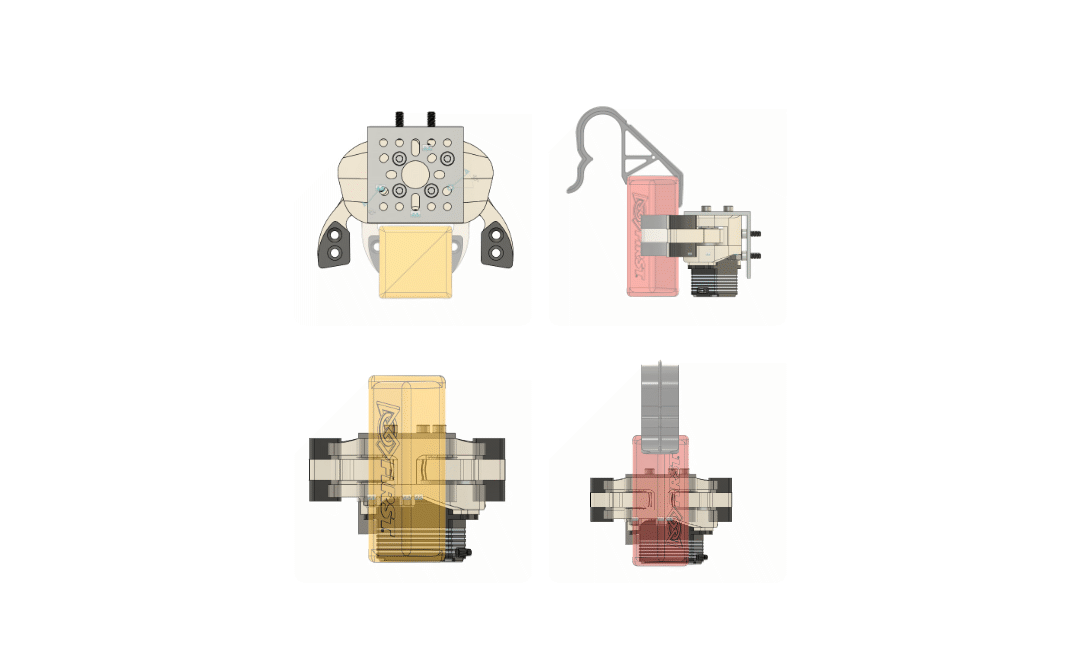
Claw
Description
A compact, modular claw designed for the Perseus robot in FTC Into the Deep, featuring TPU grips, angled servo placement, and easy serviceability for reliable Sample pickup.
Type
Solo Project
Timeline
Sep 18, 2024 - Sep 29, 2024
Client
ByteForce Robotics
My Roles
CAD Design & Modeling
Tech Used
Quick Links
GitHub
Files
Claw